Entidad financiadora
Centro para el Desarrollo Tecnológico Industrial (CDTI) Ministerio de Economía y Competitividad
Categoría
Smart Drones
Fechas de ejecución
Julio 2015 – Marzo 2017
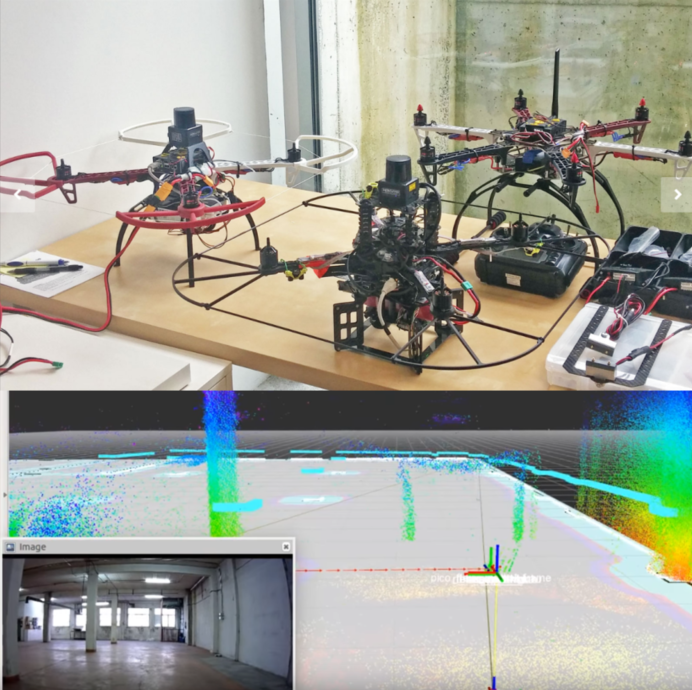
Descripción
Desarrollo de un nuevo sistema de vigilancia basado en drones con capacidad para la navegación autónoma en interiores mediante tecnología LIDAR y Visión Artificial 3D. El sistema desarrollado está compuesto por drones de vigilancia, bases de carga que permiten mantenerlos con energía y una estación de comunicaciones que garantizará el intercambio de información (datos, video, órdenes y comandos de control) entre los drones y el centro de control.
Objetivos concretos:
1. Diseño y desarrollo de un frame y sistema de propulsión de drone multirotor diseñado para la navegación en interiores.
2. Diseño y desarrollo de un sistema de navegación autónoma en interiores preciso y robusto, con capacidad para la detección y sorteo de obstáculos, basado en Visión Artificial mediante la integración de cámara 3D.
3. Desarrollo de una base de carga y comunicaciones con un sistema de control y comunicaciones seguro y tolerante a interferencias, que garantice un elevado grado de continuidad operacional en interiores.
4. Desarrollo de un sistema de transmisión de vídeo integrado en el drone con un centro de control basado en un dispositivo híbrido ad hoc que unifique una cámara de espectro visible y una cámara termográfica.
Entidades participantes
Prosegur SIS S.L., Avansig S.L., Aeromedia UAV S.L., Egatel S.L.